Harris corner detector 를 이야기 하기전에 먼저 Moravec corner detector 에 대해 언급을 해야한다. Harris corner detector 는 H. Moravec (1980) 이 제안한 corner detector 를 개선한 것이기 때문에 배경을 알고 가면 더 쉽게 이해가 된다. 사실 나도 이 논문을 읽어보진 않았다.
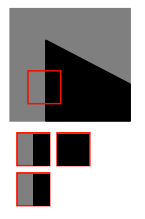
Moravec corner detector 의 핵심은 조그만 사각형 윈도우를 모든 방향으로 45도 간격으로 이동하면서 얻은 값을 가지고 코너가 있는지 여부를 판단하는 것이다. 물론 여기에는 엣지edge도 포함이 된다. 왜 45도가 되는지는 금방 알 수 있다. 모든 방향으로 1픽셀씩 움직으면 결국 8방향 45도 간격으로 밖에 되지 않기 때문이다. 실제로는 4가지 변위만 측정
 |
 |
 |
![E(u,v) = \sum\limits_{x,y}^{} w(x,y)[I(x+u,y+v)-I(x,y)]^2](https://s0.wp.com/latex.php?latex=E%28u%2Cv%29+%3D+%5Csum%5Climits_%7Bx%2Cy%7D%5E%7B%7D+w%28x%2Cy%29%5BI%28x%2Bu%2Cy%2Bv%29-I%28x%2Cy%29%5D%5E2&bg=f9f9f9&fg=555555&s=0&c=20201002) |
(1) |
window function   |
위의 그림과 식 (1)이 Moravec corner detector 이다. 




- 노이즈에 취약하다 – binary window function
- 45도 각도의 엣지만을 고려할 수 있다 –
이 문제를 해결한 것이 바로 Harris corner detector 다. Harris 는 위에서 언급한 Moravec 의 3가지 문제점에 대한 개선방안을 제시했다.
- 노이즈에 취약하다 – gaussian window function 사용
- 45도 각도의 엣지만을 고려할 수 있다 – 테일러 확장Taylor’s expansion으로
 |
(2) |
window function  |
즉, 가우시안을 윈도우 함수로 사용해서 노이즈에 대한 민감도를 낮췄다.
기존의 픽셀단위 이동으로는 엣지의 방향을 45도 간격으로 밖에 구할 수 없었다. 이를 해결하기 위해 Moravec 이 제안한 식 (1) 을 테일러 시리즈로 확장해서 엣지의 방향을 보다 정확하게 찾아낼 수 있도록 개선했다. 테일러 확장Taylor expansion한 결과는 식 (3) 과 같다. 2D 테일러 시리즈의 자세한 사항은 이전글을 참고하자.
![\begin{array}{rcl} E(u,v) & \approx & \sum\limits_{x,y}^{} w(x,y)[I(x,y) + uI_x + vI_y - I(x,y)]^2 \\ & \approx & \sum\limits_{x,y}^{} w(x,y)[u^2I_x^2 + 2uvI_xI_y + v^2I_y^2] \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brcl%7D+E%28u%2Cv%29+%26+%5Capprox+%26+%5Csum%5Climits_%7Bx%2Cy%7D%5E%7B%7D+w%28x%2Cy%29%5BI%28x%2Cy%29+%2B+uI_x+%2B+vI_y+-+I%28x%2Cy%29%5D%5E2+%5C%5C+%26+%5Capprox+%26+%5Csum%5Climits_%7Bx%2Cy%7D%5E%7B%7D+w%28x%2Cy%29%5Bu%5E2I_x%5E2+%2B+2uvI_xI_y+%2B+v%5E2I_y%5E2%5D+%5Cend%7Barray%7D&bg=f9f9f9&fg=555555&s=0&c=20201002) |
(3) |
(3) 을 다시한번 매트릭스 형태로 정렬하면,
![\begin{array}{rcl} E(u,v) & \approx & [u,v] \left( \sum\limits_{x,y}^{} w(x,y) \begin{bmatrix} I_x^2 & I_xI_y \\ I_xI_y & I_y^2 \end{bmatrix} \right) \begin{bmatrix} u \\ v \end{bmatrix} \\ \\ & \approx & [u,v]M \begin{bmatrix} u \\ v \end{bmatrix} \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brcl%7D+E%28u%2Cv%29++%26+%5Capprox+%26+%5Bu%2Cv%5D+%5Cleft%28+%5Csum%5Climits_%7Bx%2Cy%7D%5E%7B%7D+w%28x%2Cy%29+%5Cbegin%7Bbmatrix%7D+I_x%5E2+%26+I_xI_y+%5C%5C+I_xI_y+%26+I_y%5E2+%5Cend%7Bbmatrix%7D+%5Cright%29+%5Cbegin%7Bbmatrix%7D+u+%5C%5C+v+%5Cend%7Bbmatrix%7D+%5C%5C+%5C%5C+%26+%5Capprox+%26+%5Bu%2Cv%5DM+%5Cbegin%7Bbmatrix%7D+u+%5C%5C+v+%5Cend%7Bbmatrix%7D+%5Cend%7Barray%7D&bg=f9f9f9&fg=555555&s=0&c=20201002) |
(4) |
where,  |
(4) 에서 보는것 처럼 모든 
이 부분은 아직 잘 이해가 안된다. 개념적으로는 Local maxima of
이제 Harris corner detector 를 어떻게 해석하는지에 대해 살펴보자. (4) 에서 
 |
(5) |
where,  is rotation, is rotation,  is Diagonal is Diagonal |
![\begin{array}{rcl} E(u,v) & \approx & [u,v] Q^{\mathsf{T}} \Lambda Q \begin{bmatrix} u \\ v \end{bmatrix} \\ \\ & \approx & [u',v'] \Lambda \begin{bmatrix} u' \\ v' \end{bmatrix} \\ \\ & \approx & \Lambda_{1,1} (u')^2 + \Lambda_{2,2} (v')^2 \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brcl%7D+E%28u%2Cv%29++%26+%5Capprox+%26+%5Bu%2Cv%5D++Q%5E%7B%5Cmathsf%7BT%7D%7D+%5CLambda+Q++%5Cbegin%7Bbmatrix%7D+u+%5C%5C+v+%5Cend%7Bbmatrix%7D+%5C%5C+%5C%5C+%26+%5Capprox+%26+%5Bu%27%2Cv%27%5D+%5CLambda+%5Cbegin%7Bbmatrix%7D+u%27+%5C%5C+v%27+%5Cend%7Bbmatrix%7D+%5C%5C+%5C%5C+%26+%5Capprox+%26+%5CLambda_%7B1%2C1%7D+%28u%27%29%5E2+%2B+%5CLambda_%7B2%2C2%7D+%28v%27%29%5E2++%5Cend%7Barray%7D&bg=f9f9f9&fg=555555&s=0&c=20201002) |
(6) |
(6) 에서 보는바와 같이 
 |
(7) |
   : empirical constant : empirical constant |


